TreviPay Acquires Apruve
Click here to learn more
About Us
Customer Support
Contact Us
Menu
About Us
Customer Support
Contact Us
Login
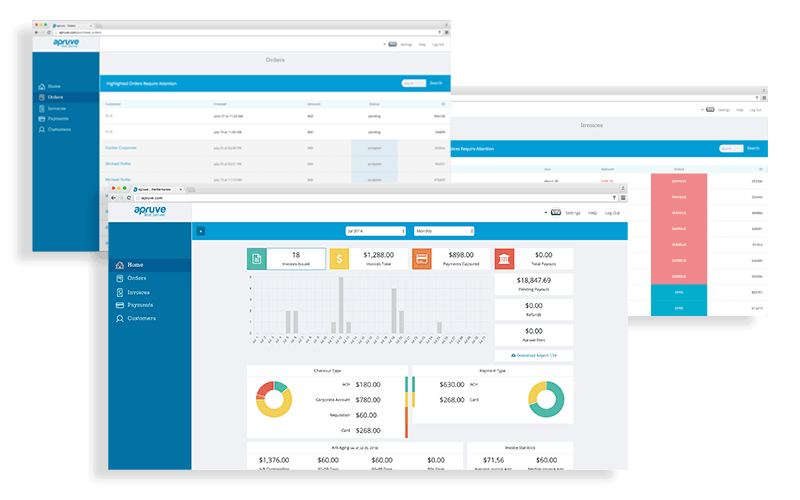
Credit Risk Management Dashboard
view all your Ecommerce net 30 accounts from one dashboard.